
The Rotation Calculator is a mathematical tool used for calculating the new position of a point after rotating it around the origin (0,0) by a certain angle. This is particularly useful in fields like computer graphics, engineering, and physics where rotation transformations are common.
Coordinate Rotation Calculator
Enter the initial coordinates and rotation details to calculate the new position after rotation.
For a more robust version of this calculator with a visual representation of the result, try How to Rotate Coordinates Calculator.
Report an issue
Spotted a wrong result, broken field, or typo? Tell us below and we’ll fix it fast.
How to Calculate Rotation Using Rotation Calculator:
To use the Rotation Calculator, follow these steps:
- Enter the X-coordinate and Y-coordinate of the point to be rotated in the input fields.
- Enter the angle of rotation in either degrees or radians, depending on the selected units.
- Select the direction of rotation (clockwise or counterclockwise).
- Click on the “Calculate” button to perform the rotation and display the new coordinates in the output fields.
Try our Physics Calculator collection here.
What is a Rotation Calculator?
With the Rotation Calculator, you can calculate the new coordinates of a point after rotating it, given the original coordinates, angle of rotation, and unit of angle.
In order to rotate, we use a rotation matrix that takes into account the angle of rotation and the direction of rotation.
The rotation matrix for a clockwise rotation is:
| cosθ sinθ | | -sinθ cosθ |
The rotation matrix for a counterclockwise rotation is:
| cosθ -sinθ | | sinθ cosθ |
where θ is the angle of rotation in radians.
To apply the rotation matrix to a point (x, y), we multiply the matrix by the column vector (x, y) and get the new coordinates (newX, newY):
newX = x * cosθ + y * sinθ (for clockwise rotation) newX = x * cosθ – y * sinθ (for counterclockwise rotation) newY = x * sinθ – y * cosθ (for both clockwise and counterclockwise rotations)
What is the formula for Rotation Calculator?
The formula for a Rotation Calculator involves using a rotation matrix to determine the new coordinates of a point after it has been rotated by a certain angle around the origin. The formulas differ slightly based on whether the rotation is clockwise or counterclockwise. The angle of rotation is typically represented by θ and is usually measured in radians.
- Counterclockwise Rotation:
- If a point (x, y) is rotated counterclockwise by an angle θ, the new coordinates (newX, newY) can be calculated using the following formulas:
- newX = x * cos(θ) – y * sin(θ)
- newY = x * sin(θ) + y * cos(θ)
- If a point (x, y) is rotated counterclockwise by an angle θ, the new coordinates (newX, newY) can be calculated using the following formulas:
- Clockwise Rotation:
- If the rotation is clockwise, the formulas are slightly modified:
- newX = x * cos(θ) + y * sin(θ)
- newY = -x * sin(θ) + y * cos(θ)
- If the rotation is clockwise, the formulas are slightly modified:
These formulas are derived from the rotation matrices for 2D transformations. The rotation matrix for counterclockwise rotation is:
And for clockwise rotation, the matrix is:
By multiplying these matrices by the column vector (x, y), you obtain the new coordinates after rotation. These formulas are fundamental in various fields like computer graphics, robotics, engineering, and physics for calculating the rotation of objects in two-dimensional space.
What is the Geometric Rotation of Coordinates?
Geometric rotation of coordinates refers to the process of rotating points in a coordinate system around a fixed point, often the origin, by a certain angle. This transformation changes the position of the points while maintaining their distances from the fixed point. Geometric rotation is commonly used in various fields like computer graphics, physics, engineering, and mathematics.
Key aspects of geometric rotation include:
Fixed Point (Pivot Point): Rotation occurs around a fixed point, typically the origin (0, 0) in 2D space, or another specified point.
Angle of Rotation: This is the degree to which the point or shape is rotated and can be measured in degrees or radians. Positive angles typically represent counterclockwise rotation, while negative angles represent clockwise rotation.
Rotation Matrix: In 2D, rotation is often performed using a rotation matrix, a specific kind of transformation matrix. The rotation matrix for a counterclockwise rotation by an angle θ is:
For a clockwise rotation, the signs of the sine components are reversed.
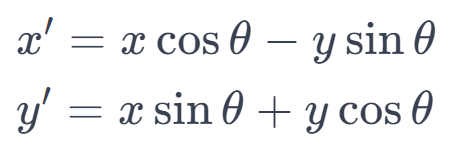
Transformation of Coordinates: To rotate a point (x, y) by an angle θ, you multiply the rotation matrix by the point’s coordinates. The resulting coordinates (x’, y’) are the point’s new location after rotation.
Applications: Geometric rotation is used in computer graphics for rotating images and models, in physics to describe rotational motion, in robotics for movement and positioning, and in mathematics for studying properties of shapes and space.
Preservation of Distance and Angle: One important property of geometric rotation is that it preserves the distances between points and the angles between lines, making it an isometric transformation. This property is crucial for maintaining the shape’s integrity during rotation.
In summary, geometric rotation of coordinates is a fundamental concept in various scientific and engineering disciplines, allowing for the manipulation of objects and points in space while preserving their fundamental properties.
How to Calculate the Rotation of a Point around the Origin in the Euclidean Plane?
Calculating the rotation of a point around the origin in the Euclidean plane involves using trigonometric functions and the concept of a rotation matrix. The process is a fundamental operation in various fields, including mathematics, physics, computer graphics, and engineering.
Here’s how you can calculate the rotation:
Define the Original Point: Suppose you have a point ( P(x, y) ) in the Euclidean plane that you want to rotate.
Define the Angle of Rotation: Let ( theta ) be the angle by which you want to rotate the point around the origin. This angle is typically measured in radians. Remember, a positive angle usually denotes a counterclockwise rotation, while a negative angle denotes a clockwise rotation.
Use the Rotation Matrix: For a counterclockwise rotation, the rotation matrix ( R ) is defined as:
For a clockwise rotation, the signs of the sine components are reversed:
Multiply the Point by the Rotation Matrix: To find the new coordinates ( P'(x’, y’) ) of the point after rotation, multiply the rotation matrix ( R ) by the column vector representing the point ( P ):
This results in:
Therefore:
Example Calculation: For example, if you have a point ( P(3, 4) ) and you want to rotate it by 45 degrees counterclockwise, you would calculate:
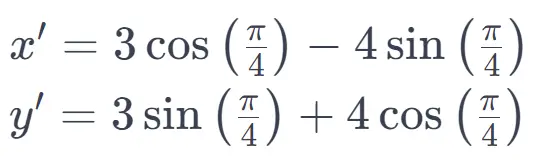
After computing the trigonometric values, you’ll get the new coordinates ( P'(x’, y’) ).
This method of calculating the rotation of a point around the origin is fundamental in understanding and applying the concepts of geometric transformations in the Euclidean plane.
Examples and Use Cases of Rotation Calculations
The process behind the Rotation Calculator involves the following key steps:
- Understanding Rotation Matrix: In 2D space, the rotation of a point (x, y) is performed using a rotation matrix, based on the angle and direction of rotation. The matrices are defined as follows:
- Clockwise Rotation Matrix: arduinoCopy code
| cosθ sinθ | | -sinθ cosθ |Counterclockwise Rotation Matrix: arduinoCopy code| cosθ -sinθ | | sinθ cosθ |
- Clockwise Rotation Matrix: arduinoCopy code
- Matrix Multiplication: The new coordinates of a point after rotation are found by multiplying the original coordinates by the rotation matrix. The formulas are:
- For clockwise rotation:
- newX = x * cosθ + y * sinθ
- newY = -x * sinθ + y * cosθ
- For counterclockwise rotation:
- newX = x * cosθ – y * sinθ
- newY = x * sinθ + y * cosθ
- For clockwise rotation:
- Example Calculation: Consider rotating a point (3, 4) by 45 degrees counterclockwise. Convert the angle to radians (0.7854 radians). Applying the counterclockwise rotation matrix, we get:
- newX ≈ 0.35
- newY ≈ 5.30
- Using a Rotation Calculator: To use this tool, you should:
- Input the X and Y coordinates of the point.
- Enter the rotation angle in degrees or radians.
- Select the rotation direction (clockwise or counterclockwise).
- Click “Calculate” to obtain the new coordinates.
Rotation Calculator simplifies the process of performing rotation transformations, making them invaluable in educational and practical scenarios for quick and accurate results.
Suppose we want to rotate a point (3, 4) by an angle of 45 degrees in a counterclockwise direction.
First, we convert the angle to radians:
- θ = 45 * π / 180 = 0.7854 radians
Next, we apply the rotation matrix:
- newX = 3 * cos(0.7854) – 4 * sin(0.7854) = 0.35 newY = 3 * sin(0.7854) + 4 * cos(0.7854) = 5.30
Therefore, the new coordinates of the point after rotation are (0.35, 5.30).
Below is a table detailing various types of rotation transformations. This table includes the type of rotation, the rotation matrix, and a brief description of each transformation type:
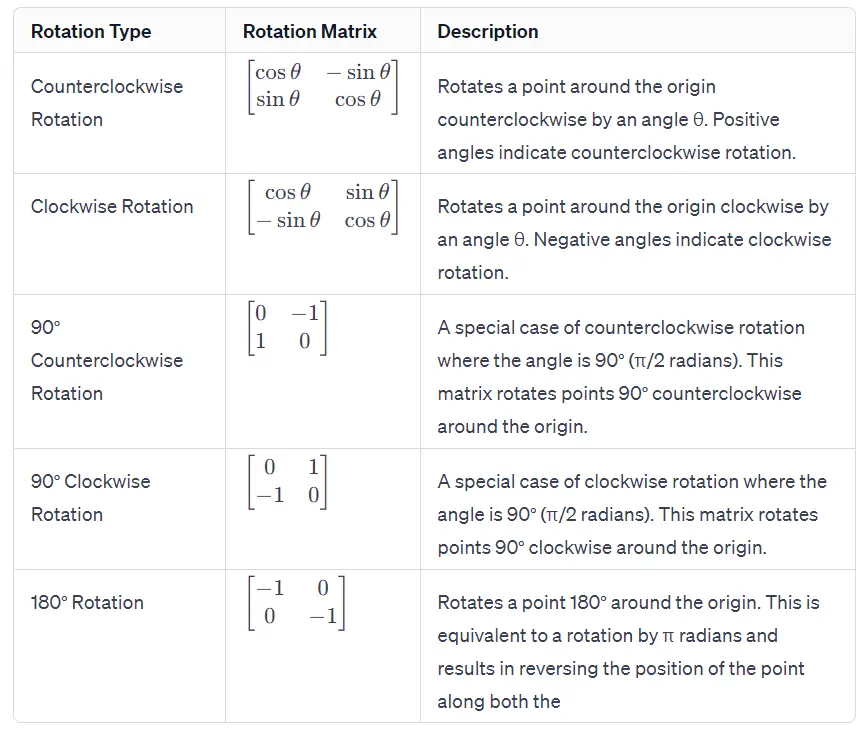
This table serves as a quick reference for common rotation transformations and their associated matrices, providing a concise overview of how different angles and pivot points affect the rotation process.
Real-World Use Cases of Rotation Calculator
The Rotation Calculator is an invaluable tool in various fields for computing the effects of rotating objects or coordinates. Here are some practical examples where this tool plays a crucial role:
Rotation Calculator in Computer Graphics and Animation
In the realm of Computer Graphics and Animation, the Rotation Calculator proves to be an indispensable tool for manipulating and animating characters and objects within a 3D space. This tool allows animators and graphic designers to precisely calculate the new coordinates of an object or character after rotation, ensuring accurate and realistic movement within the digital environment.
For instance, consider the task of rotating a character model located at coordinates (5, 3) by 90 degrees counterclockwise for a particular scene. By applying the counterclockwise rotation matrix to this scenario, the angle of 90 degrees is first converted to radians (π/2 radians). The calculation then proceeds with the matrix, resulting in newX = 0 and newY = 5.
Thus, the character’s new position after the rotation would be accurately positioned at coordinates (0, 5), enabling a seamless and accurate portrayal in the animated scene. This process is fundamental in creating dynamic, engaging, and visually appealing animations and graphics.
- Use Case: Rotating a character or object in a 3D space.
- Example: To rotate a character model positioned at (5, 3) by 90 degrees counterclockwise for a scene.
- Calculation:
- Angle: 90 degrees = π/2 radians.
- Using the counterclockwise rotation matrix:
- newX = 5 * cos(π/2) – 3 * sin(π/2) = 0
- newY = 5 * sin(π/2) + 3 * cos(π/2) = 5
- The new position is (0, 5).
Rotation Calculator in Engineering and Architecture
In the fields of Engineering and Architecture, the Rotation Calculator is an essential tool for the precise planning and execution of component rotations in mechanical designs and architectural models.
This calculator enables engineers and architects to accurately determine the new coordinates of a structural component after it has been rotated, ensuring that the design maintains its integrity and functionality. For example, consider the task of rotating a beam joint in a structure, initially positioned at coordinates (10, 7), by 30 degrees in a clockwise direction.
By utilizing the clockwise rotation matrix, the angle of 30 degrees is first converted into radians (π/6 radians). The matrix’s application results in newX ≈ 11.70 and newY ≈ 4.33. Consequently, the beam joint’s new position after this rotation is approximately at coordinates (11.70, 4.33).
- Use Case: Planning the rotation of components in mechanical designs or architectural models.
- Example: Rotating a beam joint in a structure at (10, 7) by 30 degrees clockwise.
- Calculation:
- Angle: 30 degrees = π/6 radians.
- Using the clockwise rotation matrix:
- newX = 10 * cos(π/6) + 7 * sin(π/6) ≈ 11.70
- newY = -10 * sin(π/6) + 7 * cos(π/6) ≈ 4.33
- The new position of the joint is approximately (11.70, 4.33).
This accurate calculation is crucial for ensuring the structural soundness and aesthetic alignment of the design, highlighting the indispensable role of the Rotation Calculator in engineering and architectural design processes.
Rotation Calculator in Geographic Information Systems (GIS)
In Geographic Information Systems (GIS), the Rotation Calculator plays a crucial role in adjusting the orientation of geospatial features for accurate map representation. This tool is particularly useful for ensuring that landmarks and other map icons are correctly aligned with their real-world positions and orientations.
For instance, consider the scenario where a landmark icon at coordinates (2, 6) needs to be rotated by 45 degrees counterclockwise. This is a common requirement in GIS for aligning map elements with geographic features or correcting for discrepancies.
By applying the counterclockwise rotation matrix with an angle of 45 degrees (π/4 radians), the calculation yields new coordinates: newX ≈ -2.83 and newY ≈ 5.66.
Thus, the landmark icon’s adjusted position on the map would be approximately (-2.83, 5.66), enhancing the map’s accuracy and usability. This example underscores the importance of the Rotation Calculator in the precise and effective manipulation of spatial data within GIS applications.
- Use Case: Adjusting the orientation of geospatial features on a map.
- Example: Rotating a landmark icon at coordinates (2, 6) by 45 degrees counterclockwise for accurate map representation.
- Calculation:
- Angle: 45 degrees = π/4 radians.
- Using the counterclockwise rotation matrix:
- newX = 2 * cos(π/4) – 6 * sin(π/4) ≈ -2.83
- newY = 2 * sin(π/4) + 6 * cos(π/4) ≈ 5.66
- The adjusted position of the icon is approximately (-2.83, 5.66).
Rotation Calculator in Robotics
In the field of Robotics, the Rotation Calculator is a vital tool for determining the new orientation of robot components, such as arms or end-effectors. This tool is essential for programming precise movements and orientations required in complex robotic operations. Consider a robotic arm that needs to rotate its end-effector from a starting position of (4, 9).
If the required operation involves rotating the end-effector by 60 degrees in a clockwise direction, the Rotation Calculator becomes instrumental. By inputting the angle of 60 degrees, converted to π/3 radians for calculation purposes, and applying the clockwise rotation matrix, the new coordinates of the end-effector can be accurately determined.
The calculation reveals that the new position is approximately (10.96, 4.60). This precision in positioning is crucial in robotics, where even minute deviations can lead to significant errors in operations.
Therefore, the Rotation Calculator not only aids in the accurate movement of robotic components but also ensures the efficiency and reliability of robotic systems in various applications.
- Use Case: Determining the new orientation of a robot’s arm or component.
- Example: A robotic arm needs to rotate its end-effector from position (4, 9) by 60 degrees clockwise for an operation.
- Calculation:
- Angle: 60 degrees = π/3 radians.
- Using the clockwise rotation matrix:
- newX = 4 * cos(π/3) + 9 * sin(π/3) ≈ 10.96
- newY = -4 * sin(π/3) + 9 * cos(π/3) ≈ 4.60
- The new position of the end-effector is approximately (10.96, 4.60).
Additional Resources about Rotation Calculator and Rotation Calculations
Trigonometry in Rotation Calculations
Trigonometry, the branch of mathematics dealing with angles and their relationships in triangles, plays a critical role in rotation calculations. The sine, cosine, and tangent functions are pivotal in determining the new coordinates of a point after rotation.
These trigonometric functions help calculate the lengths of sides in right-angled triangles, which are analogous to the distances and angles involved in rotation around a pivot point. Understanding how these functions change with varying angles is essential for accurately predicting the outcome of a rotation.
This foundational knowledge is crucial not only in mathematics but also in fields like engineering and computer graphics, where rotation transformations are frequently applied.
The Role of Rotation Calculations in Physics
In the realm of physics, rotation calculations are indispensable, particularly in studying the dynamics of rotational motion. They are used to determine the angular displacement, velocity, and acceleration of rotating bodies, which are key concepts in mechanics.
In kinematics, rotation calculations help in analyzing the motion of objects without considering the forces causing the motion. This application is crucial in understanding phenomena such as the conservation of angular momentum and the behavior of gyroscopes.
These calculations are also fundamental in celestial mechanics, where they are used to predict the orbits of planets and the rotation of galaxies.
Advanced Applications in Robotics and Automation
Rotation calculations are pivotal in the field of robotics and automation. They enable precise control of robotic arms and manipulators, which is essential for tasks requiring high accuracy, such as in assembly lines or surgical robots.
In automation systems, these calculations facilitate the movement of components and machinery in a controlled and predictable manner. Advanced robotics often employs quaternions – a number system that extends complex numbers – for rotation calculations, as they help avoid issues like gimbal lock, which can occur with traditional Euler angles.
Understanding and implementing these calculations are fundamental for developing sophisticated robotic systems that can interact effectively with their environment.
Rotation Calculations in Navigation and Aerospace
In navigation and aerospace engineering, rotation calculations are crucial for orientation and attitude control. These calculations are integral to the functioning of inertial navigation systems used in aircraft and spacecraft.
They help in determining the orientation of a vessel relative to a reference frame, essential for course correction and stable flight. In aerospace, these calculations are also used in attitude control systems of satellites and space probes, enabling them to maintain the correct orientation in space, which is vital for communication, data collection, and solar panel positioning.
Software and Tools for Rotation Calculations
Various software tools and programs facilitate rotation calculations. These tools range from simple online calculators to advanced software like MATLAB or Python libraries that can handle complex 3D transformations.
They are designed to assist in visualizing and computing rotations, making them accessible for educational, professional, and research purposes. Some software packages offer interactive interfaces where users can input parameters and visualize the results in real-time, enhancing understanding and accuracy in applications like computer graphics, engineering design, and physics simulations.
Mathematical Theory Behind Rotation Transformations
The mathematical theory behind rotation transformations is rooted in linear algebra and vector calculus. These transformations are represented using matrices and vectors, providing a systematic method for calculating the rotation of points or objects in space.
Understanding the properties of rotation matrices, such as their orthogonality and determinant value, is crucial in ensuring that the transformations preserve the shape and size of the objects being rotated. This theory forms the backbone of many practical applications, from the rotation of images in computer graphics to the analysis of stress in mechanical components.
Historical Evolution of Rotation Calculations
The history of rotation calculations is a fascinating journey through mathematics and physics. From the early geometric insights of ancient Greek mathematicians to the development of trigonometry in medieval times, the understanding of rotational motion has evolved significantly.
The introduction of calculus by Newton and Leibniz further advanced this field, enabling more precise and complex calculations. The 20th century saw the incorporation of computer technology, dramatically enhancing the ability to perform and apply rotation calculations in numerous fields, reflecting the progress of human knowledge in understanding and manipulating spatial transformations.
Challenges and Limitations in Rotation Calculations
Despite their widespread application, rotation calculations come with certain challenges and limitations. One significant issue is the precision of computational methods, especially in scenarios requiring high degrees of accuracy, such as in aerospace engineering.
Another challenge is the computational complexity involved in 3D transformations, which can be resource-intensive. Additionally, when using Euler angles for rotations, issues such as gimbal lock can arise, where the loss of one degree of freedom in 3D space leads to problematic calculations. Understanding these limitations is crucial in choosing the right method and tools for specific applications.
Overview of Rotation Calculator
The Rotation Calculator is a powerful mathematical tool used to compute the new position of a point or an object after it has been rotated around a fixed pivot point by a specific angle. This concept is fundamental in various fields such as computer graphics, engineering, architecture, robotics, and geographic information systems (GIS).
The process involves understanding and applying rotation matrices, which are mathematical constructs that facilitate the rotation of points in two-dimensional space. These matrices vary depending on whether the rotation is clockwise or counterclockwise. The key to using a rotation calculator effectively lies in correctly applying these matrices to the original coordinates of the point or object being rotated.
For standard rotations around the origin, the formulas are straightforward. However, rotations around an arbitrary pivot point require additional steps, including translating the point to the origin, performing the rotation, and then translating it back to its original position relative to the pivot.
The Rotation Calculator is an indispensable tool in many technical and creative disciplines. Its ability to precisely calculate the outcome of a rotation transformation makes it invaluable in scenarios where accuracy and precision are paramount. Whether it’s for designing a mechanical component, animating a character in a 3D environment, adjusting the orientation of a map feature, or programming the movement of a robotic arm, the Rotation Calculator provides a reliable and efficient means to achieve the desired spatial adjustments.
Understanding and utilizing this tool can significantly enhance the quality and accuracy of work in any field that involves spatial transformations.